
Hi there! I’m a research engineer at General Robotics, focusing on robot learning methods that enable generalizable manipulation across diverse robot form-factors including arms, mobile manipulators, and humanoids.
Prior to General Robotics, I did my Master’s in Robotics at Robotics Institute, Carnegie Mellon University. I was advised by Prof. Katerina Fragkiadaki and my research focused on enabling embodied agents to learn from internet-scale data.
🔥 News
- Feb, 2026: Our work DreamControl: Humanoid Locomanipulation via Guided Diffusion accepted at ICRA 2026.
- Sept, 2025: Released our work DreamControl on leveraging large-scale human motion datasets for humanoid whole-body skill learning.
- March, 2025: Served as a TA in GRID Workshop at Nvidia GTC’25 in San Jose.
- Dec, 2024: Co-developed GRID-Isaac on OpenGRID platform serving 3000+ active users, multiple enterprise clients.
- July, 2024: Joined General Robotics to work on robot learning, manipulation and humanoids.
- June, 2024: Presented ODIN at CVPR in Seattle, WA.
- May, 2024: Presented Gen2Sim at ICRA in Yokohama, Japan.
- February, 2024: Our work ODIN: A Single Model for 2D and 3D Perception accepted at CVPR 2024.
- January, 2024: Our work Gen2Sim: Scaling up Robot Learning in Simulation with Generative Models accepted at ICRA 2024.
- November, 2023: Served as a reviewer at CVPR 2024, ICRA 2024, ICLR 2024.
- November, 2023: Volunteered at CoRL 2023. Presented Gen2Sim in Towards Generalist Robots Workshop at CoRL 2023.
- August, 2022: Joined Carnegie Mellon University for MS in Robotics.
- July, 2021: Our work RTVS accepted at IRoS 2021.
- Aug, 2020: Our work DeepMPCVS accepted at CoRL 2020.
- October, 2019: Attended Google Summer of Code Mentor Summit in Munich, Germany.
- May, 2018: Joined JdeRobot - Universidad Rey Juan Carlos for Google Summer of Code program.
📝 Publications
DreamControl: Human-Inspired Whole-Body Humanoid Control for Scene Interaction via Guided Diffusion
Dvij Kalaria, Sudarshan S Harithas, Pushkal Katara, Sangkyung Kwak, Sarthak Bhagat, Shankar Sastry, Srinath Sridhar, Sai Vemprala, Ashish Kapoor, Jonathan Chung-Kuan Huang
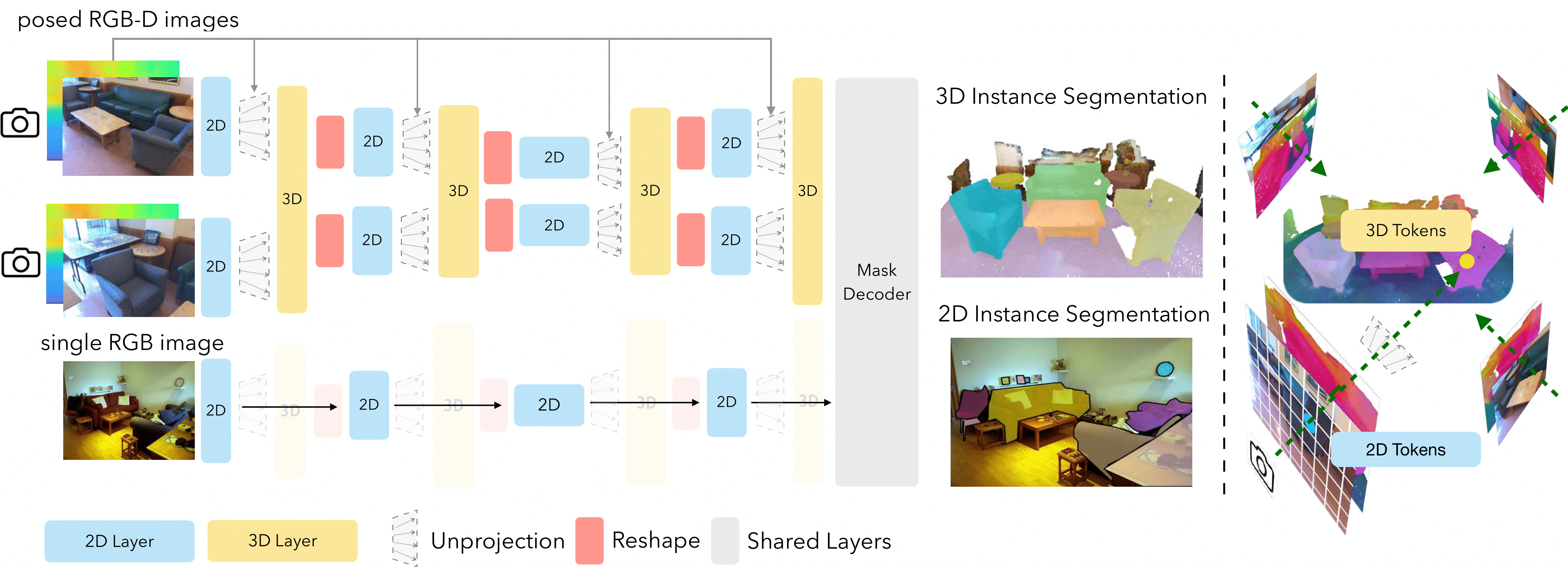
ODIN: A Single Model for 2D and 3D Perception
Ayush Jain, Pushkal Katara, Nikolaos Gkanatsios, Adam W. Harley, Gabriel Sarch, Kriti Aggarwal, Vishrav Chaudhary, Katerina Fragkiadaki
Gen2Sim: Scaling up Robot Learning in Simulation with Generative Models
Pushkal Katara, Zhou Xian, Katerina Fragkiadaki
-
Generation to Simulation (Gen2Sim), a method for scaling up robotic skill learning in simulation.
-
Leverages foundational generative models of image and language to scale up simulation environments, tasks and demonstrations.
-
[IRoS 2021] RTVS: Deep Model Predictive Control for Visual Servoing
Pushkal Katara, M. Nomaan Qureshi, Abhinav Gupta, Harit Pandya, Y V S Harish, K. Madhava Krishna -
[CoRL 2020] DeepMPCVS: Deep Model Predictive Control for Visual Servoing
Pushkal Katara, Y V S Harish, Harit Pandya, Abhinav Gupta, Madhava Krishna K
📖 Educations
- Aug 2022 - June 2024, Masters of Science in Robotics, Carnegie Mellon University.
- Aug 2016 - May 2020, Bachelors of Technology in Computer Science, SRM University.